作者 | Michael Crosby
譯者 | qhwdw
我們在過去的文章中討論了一些 containerd 的不同特性,它是如何設計的,以及隨著時間推移已經修複的一些問題。containerd 被用於 Docker、Kubernetes CRI、以及一些其它的專案,在這些平臺中事實上都使用了 containerd,而許多人並不知道 containerd 存在於這些平臺之中,這篇文章就是為這些人所寫的。我將來會寫更多的關於 containerd 的設計以及特性集方面的文章,但是現在,讓我們從它的基礎知識開始。

我認為容器生態系統有時候可能很複雜。尤其是我們所使用的術語。它是什麼?一個執行時,還是別的?一個執行時 … containerd(它的發音是 “container-dee”)正如它的名字,它是一個容器守護行程,而不是一些人忽悠我的“收集迷”。它最初是作為 OCI 執行時(就像 runc 一樣)的整合點而構建的,在過去的六個月中它增加了許多特性,使其達到了像 Docker 這樣的現代容器平臺以及像 Kubernetes 這樣的編排平臺的需求。
那麼,你使用 containerd 能去做些什麼呢?你可以擁有推送或拉取功能以及映象管理。可以擁有容器生命週期 API 去建立、執行、以及管理容器和它們的任務。一個完整的專門用於快照管理的 API,以及一個其所依賴的開放治理的專案。如果你需要去構建一個容器平臺,基本上你不需要去處理任何底層作業系統細節方面的事情。我認為關於 containerd 中最重要的部分是,它有一個版本化的並且有 bug 修複和安全補丁的穩定 API。
由於在核心中沒有一個 Linux 容器這樣的東西,因此容器是多種核心特性捆綁在一起而成的,當你構建一個大型平臺或者分散式系統時,你需要在你的管理程式碼和系統呼叫之間構建一個抽象層,然後將這些特性捆綁粘接在一起去執行一個容器。而這個抽象層就是 containerd 的所在之處。它為穩定型別的平臺層提供了一個客戶端,這樣平臺可以構建在頂部而無需進入到核心級。因此,可以讓使用容器、任務、和快照型別的工作相比透過管理呼叫去 clone() 或者 mount() 要友好的多。與靈活性相平衡,直接與執行時或者宿主機互動,這些物件避免了常規的高階抽象所帶來的效能犧牲。結果是簡單的任務很容易完成,而困難的任務也變得更有可能完成。

containerd
containerd 被設計用於 Docker 和 Kubernetes、以及想去抽象出系統呼叫或者在 Linux、Windows、Solaris 以及其它的作業系統上特定的功能去執行容器的其它容器系統。考慮到這些使用者的想法,我們希望確保 containerd 只擁有它們所需要的東西,而沒有它們不希望的東西。事實上這是不太可能的,但是至少我們想去嘗試一下。雖然網路不在 containerd 的範圍之內,它並不能做成讓高階系統可以完全控制的東西。原因是,當你構建一個分散式系統時,網路是非常中心的地方。現在,對於 SDN 和服務發現,相比於在 Linux 上抽象出 netlink 呼叫,網路是更特殊的平臺。大多數新的網路都是基於路由的,並且每次一個新的容器被建立或者刪除時,都會請求更新路由表。服務發現、DNS 等等都需要及時被通知到這些改變。如果在 containerd 中新增對網路的管理,為了能夠支援不同的網路介面、鉤子、以及整合點,將會在 containerd 中增加很大的一塊程式碼。而我們的選擇是,在 containerd 中做一個健壯的事件系統,以便於多個消費者可以去訂閱它們所關心的事件。我們也公開釋出了一個 任務 API[1],它可以讓使用者去建立一個執行任務,也可以在一個容器的網路名稱空間中新增一個介面,以及在一個容器的生命週期中的任何時候,無需複雜的鉤子來啟用容器的行程。
在過去的幾個月中另一個新增到 containerd 中的領域是完整的儲存,以及支援 OCI 和 Docker 映象格式的分散式系統。有了一個跨 containerd API 的完整的目錄地址儲存系統,它不僅適用於映象,也適用於元資料、檢查點、以及附加到容器的任何資料。
我們也花時間去 重新考慮如何使用 “圖驅動” 工作[2]。這些是疊加的或者允許映象分層的塊級檔案系統,可以使你執行的構建更加高效。當我們新增對 devicemapper 的支援時,圖驅動最初是由 Solomon 和我寫的。Docker 在那個時候僅支援 AUFS,因此我們在疊加檔案系統之後,對圖驅動進行了建模。但是,做一個像 devicemapper/lvm 這樣的塊級檔案系統,就如同一個堆疊檔案系統一樣,從長遠來看是非常困難的。這些介面必須基於時間的推移進行擴充套件,以支援我們最初認為並不需要的那些不同的特性。對於 containerd,我們使用了一個不同的方法,像快照一樣做一個堆疊檔案系統而不是相反。這樣做起來更容易,因為堆疊檔案系統比起像 BTRFS、ZFS 以及 devicemapper 這樣的快照檔案系統提供了更好的靈活性。因為這些檔案系統沒有嚴格的父/子關係。這有助於我們去構建出 快照的一個小型介面[3],同時還能滿足 構建者[4] 的要求,還能減少了需要的程式碼數量,從長遠來看這樣更易於維護。

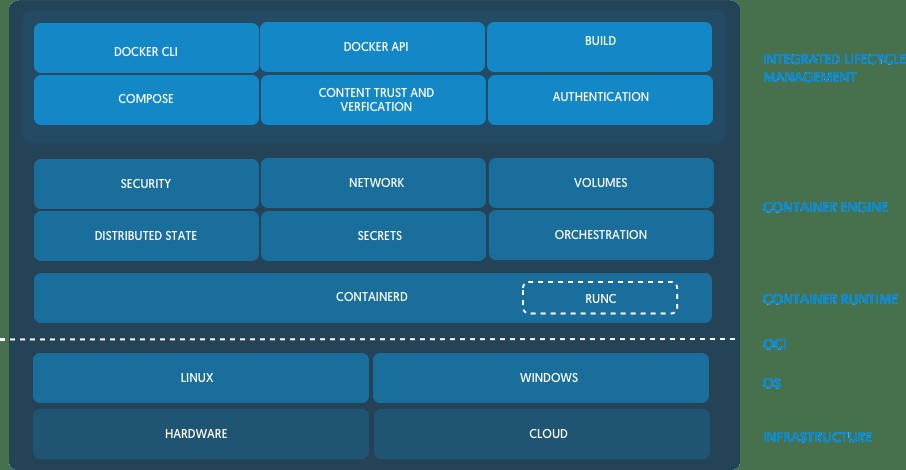
你可以在 Stephen Day 2017/12/7 在 KubeCon SIG Node 上的演講[5]找到更多關於 containerd 的架構方面的詳細資料。
除了在 1.0 程式碼庫中的技術和設計上的更改之外,我們也將 containerd 管理樣式從長期 BDFL 樣式轉換為技術委員會[6],為社群提供一個獨立的可信任的第三方資源。
via: https://blog.docker.com/2017/12/containerd-ga-features-2/
作者:Michael Crosby[8] 譯者:qhwdw 校對:wxy
本文由 LCTT 原創編譯,Linux中國 榮譽推出