
點選 《福利來了!PLC的資料(免費),你要嗎?》
運動控制指令“MC_MoveJog”的任務是實現點動操作。
● 運動控制任務“MC_MoveJog”的結束沒有明確的定義。
第一次達到設定的速度且軸恆速運轉時,就實現了任務標的。
如果達到設定的速度,則透過輸出引數“InVelocity”的 TURE 值對此進行指示。
● 輸入引數“JogForward”或“JogBackward”的值已設定為 FALSE並且軸已停止時,命令完成。
● 輸出引數“Busy”、“CommandAborted”和“Error”發出訊號,指示任務仍在處理、已中止或有未決的錯誤。
– 在運動控制任務處理期間,輸出引數“Busy”的值為 TRUE。如果任務已完成、中止或因錯誤停止,則輸出引數“Busy”的值將變為 FALSE。
– 只要軸在以設定的速度運轉,輸出引數“InVelocity”的值就為 TRUE。輸出引數“CommandAborted”和“Error”保持該狀態至少一個週期。
只要輸入引數“JogForward”或“JogBackward”設定為TRUE,就鎖存這些狀態訊息。
下圖針對各種示例情況顯示了狀態位的操作。
● 第一個示例顯示了達到並保持設定的速度時的軸行為。
如果運動控制任務已在達到設定的速度前完成執行,則透過輸出引數“InVelocity”的TURE 值對此進行指示。
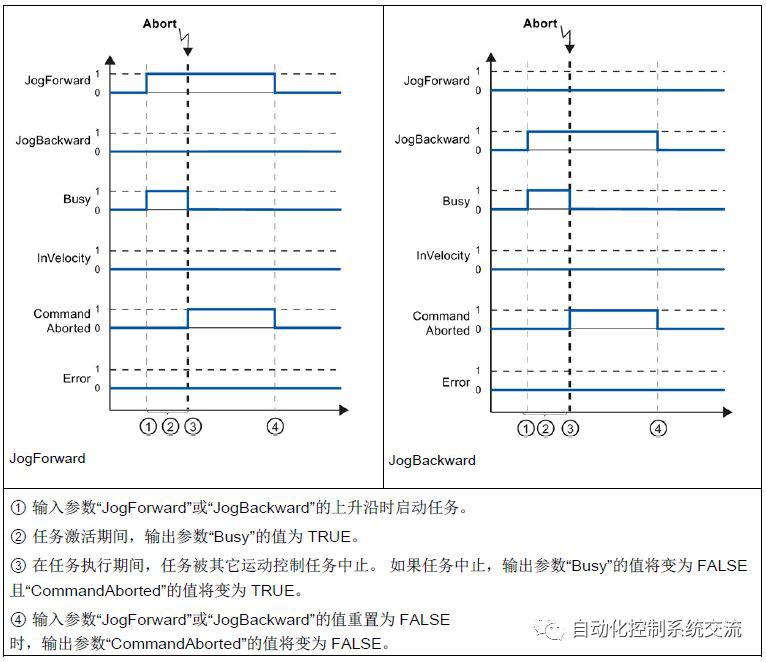
● 第二個示例顯示了任務中止時的軸行為。
如果運動控制任務在執行期間中止,則透過輸出引數“CommandAborted”的TURE值對此進行指示。 該行為與是否達到設定的速度無關。
● 第三個示例顯示了出現錯誤時的軸行為。
如果在運動控制任務執行期間出錯,則透過輸出引數“Error”的 TURE值對此進行指示。 該行為與是否達到設定的速度無關。
示例 1 – 如果達到並保持設定的速度

示例 2 – 如果任務在執行期間中止
說明
如果滿足以下所有條件,則在輸出引數“CommandAborted”中指示任務中止並且僅持續一個執行週期:
輸入引數“JogForward”和“JogBackward”的值為FALSE(但軸仍在減速),並且新的運動控制任務已啟動。
示例 3 – 如果在任務執行期間出錯

說明
如果滿足以下所有條件,則在輸出引數“Error”中指示出錯並且僅持續一個執行週期:輸入引數“JogForward”和“JogBackward”的值為FALSE(但軸仍在減速),並且發生新錯誤(例如,逼近軟體限位開關)。
![]() 尋找同路人
尋找同路人![]()
可透過選單查詢自己喜歡的文章彙總:
【現場儀錶】【DCS部分】【PLC部分】【SIS部分】【通訊】【標準】【數字化】【問題解答】此處列出部分連結,更多文章透過選單獲取。

